コンピュータ技術によって安全を向上させる機能安全規格の普及をはかります。
マルコフモデル
マルコフモデル
IEC 61508 Part6には、PFDavgやPFHの計算式が記載されていますが、非対称の冗長系や複雑な場合には、これらの計算式が使えない場合があることに注意が必要です。マルコフモデルは、これらの場合にも柔軟に適用でき、故障の順序や修理なども考慮できる汎用性が非常に大きい利便性の高いツールです。しかしながら、作成方法が難しいという指摘があるとともに、実際的な解説書が見当たらないという状況がありました。そのため、実務者がマルコフモデルを習得することを目的にしてENaviMarkovを開発しました。
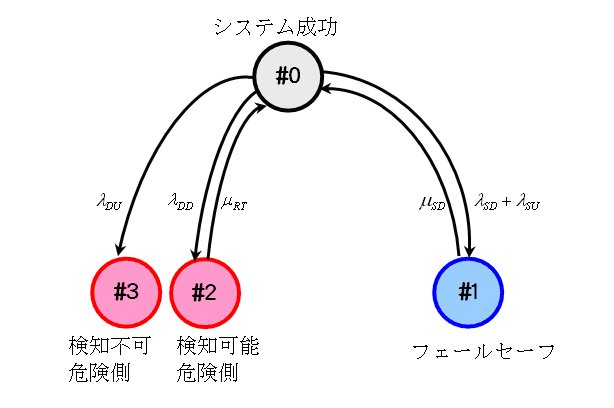
マルコフモデルで解析を行うためには、FNaviで求めた4つの故障率λSD、λSU、λDD、λDUが入力として必要です。さらに、冗長システムの場合には、BNaviで求めた共通原因故障割合を考慮する必要があります。マルコフモデルは、故障の組み合わせを前提にするため、自動化できると考えることがありますが、実際にはシステム内の故障時の挙動を知る必要があるため、技術者の分析が前提になります。状態の遷移をマルコフモデルに表すと、比較的簡単に解析してPFDavgやPFHを解析することが可能になります。
ENaviMarkovには低頻度作動要求モードと連続モードのマルコフモデルの作成について、仮想的なシステムを対象にして解説しています。また、フリーの数値解析コードScilabのインプットが内蔵されているので、実際にPFDavgやPFHの解析も行うことができます。
IEC 61508のSILやISO 13849-1のPLのような機能安全の中心となる概念のベースは信頼性工学です。認証取得を目的とする場合には必ずしも必要と考えられていないようですが、機能安全への適合を目的とする企業は、技術解説の検証事例でわかるようにマルコフモデルのような信頼性工学の技術を充分に習得しておくことが重要です。